Projects
Robotics research, embedded systems, and cyber-physical builds.
Work across multimodal mobile robots, ROS2 teleoperation, embedded control, sensor-actuator platforms, automation, and selected current embedded product software described at a public, non-confidential level.
2024 - 2025 | Research Assistant, IISc Bangalore
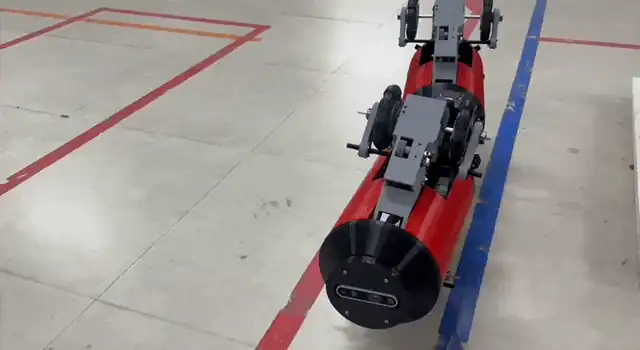
Multimodal Mobile Robot
Autonomous multimodal robot for inspection and surveillance in constrained environments, combining bio-inspired mechanisms, distributed embedded control, perception, and ROS2 teleoperation.
- Simulated robot mechanisms in SolidWorks Motion Analysis to estimate torque, force profiles, and component requirements.
- Designed a distributed embedded architecture where local microcontrollers handle mechanisms and a Jetson board coordinates system-level control.
- Implemented CAN communication between microcontrollers and the main compute board for real-time coordination.
- Built ROS2 WiFi teleoperation workflows for remote testing and field-oriented validation.
ROS2Jetson NanoIntel RealSenseSolidWorksPythonC++
2022 - 2024 | Junior Research Fellow, NITK Surathkal
ACPS Lab Platform
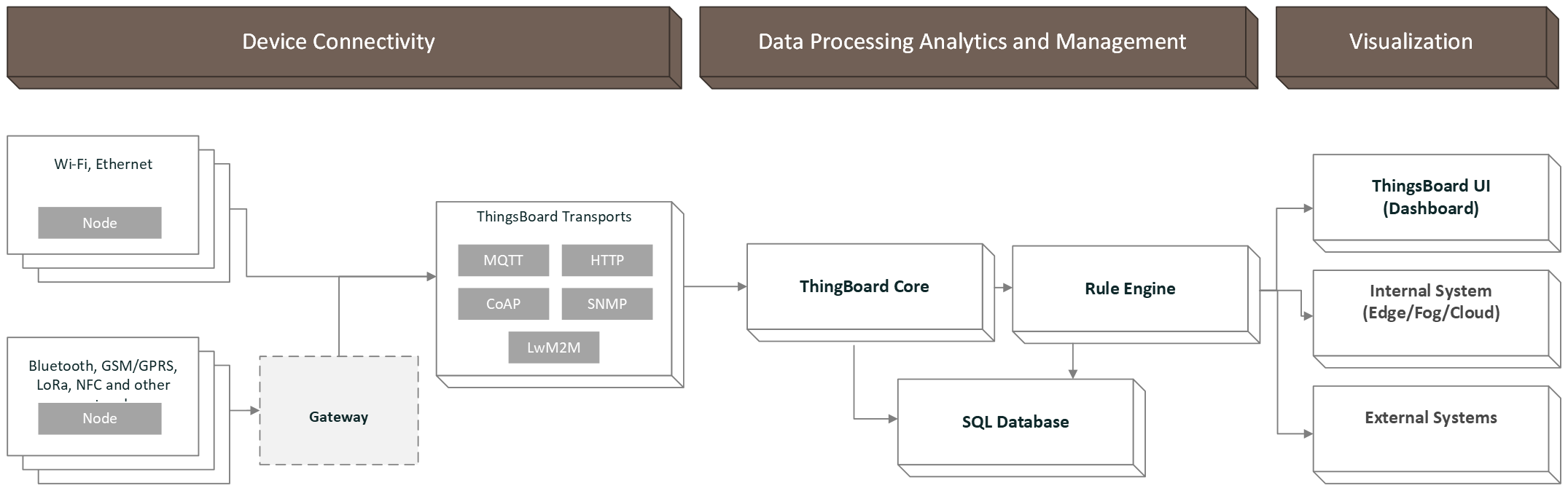
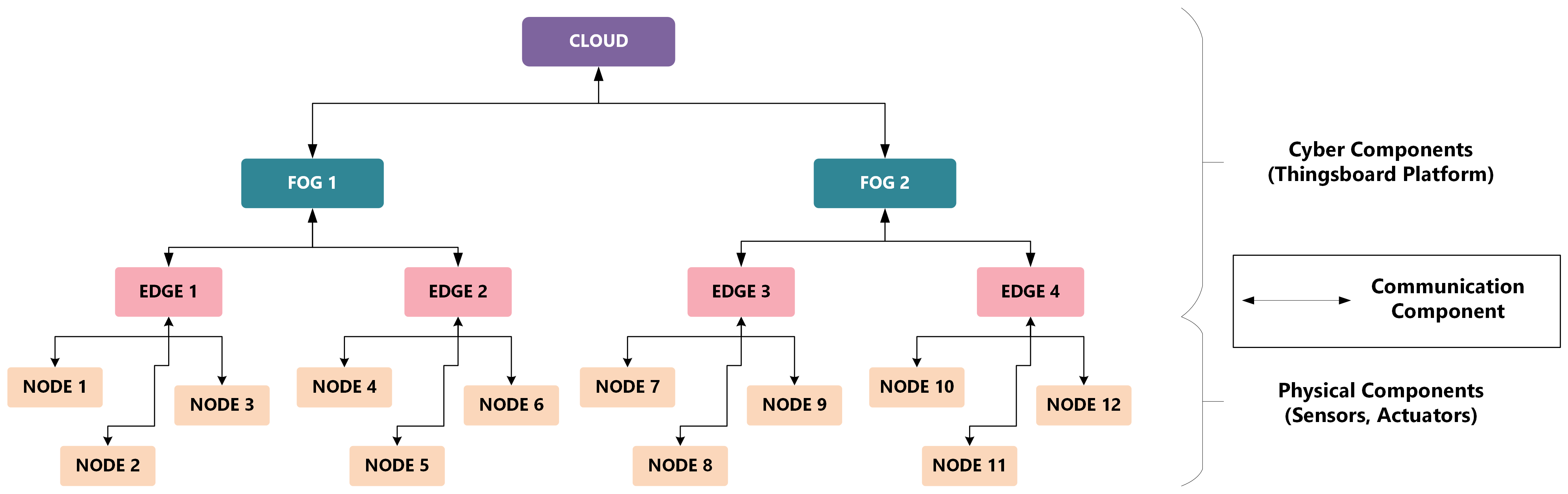
Lab-scale applied cyber-physical systems platform for education and research, with sensor-actuator nodes, edge-fog-cloud architecture, and real-time data acquisition.
- Developed ARM-based sensor-actuator nodes for real-time acquisition and control experiments.
- Integrated edge, fog, and cloud layers to demonstrate cyber-physical system interactions.
- Created hands-on learning workflows for embedded systems, communication protocols, and system integration.
- Presented the work at the 11th ISSS National Conference.
STM32ESP32MQTTPythonWeb Technologies
2025 - Present | Software Engineer Level 2, Capla India
CAPLA Embedded Product Software
Current software engineering work in CAPLA's embedded product software ecosystem, involving Linux-based application features, hardware-connected workflows, and robotics-adjacent product areas at a public, non-confidential level.
- Develop C++/Qt/QML application features for Linux-based embedded product software on Jetson-class platforms.
- Work with hardware-connected software concepts including imaging/tracking interfaces, communication paths, testing, and real-time debugging.
- Apply robotics, computer vision, sensor fusion, and embedded systems background to robust hardware-integrated application workflows.
- Public description is limited to company-published product areas and job-description-level responsibilities, excluding proprietary architecture, source code, internal data, and implementation details.
C++Qt/QMLEmbedded LinuxNVIDIA JetsonComputer visionSensor fusion
2019
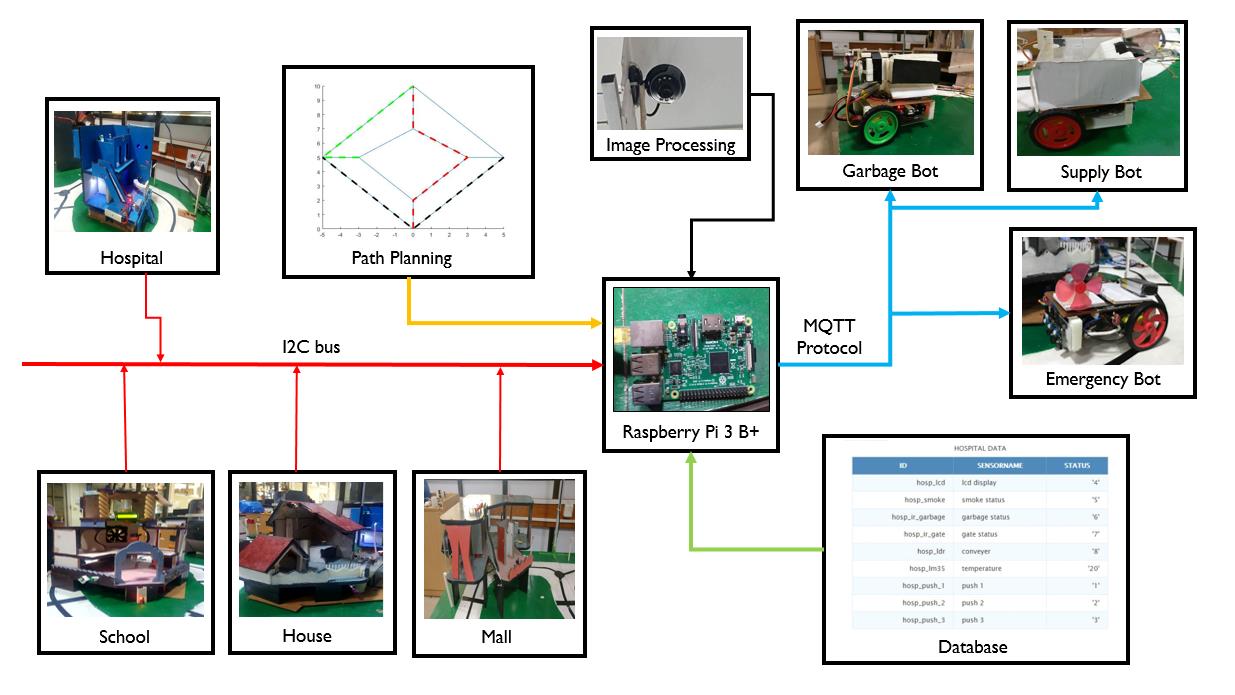
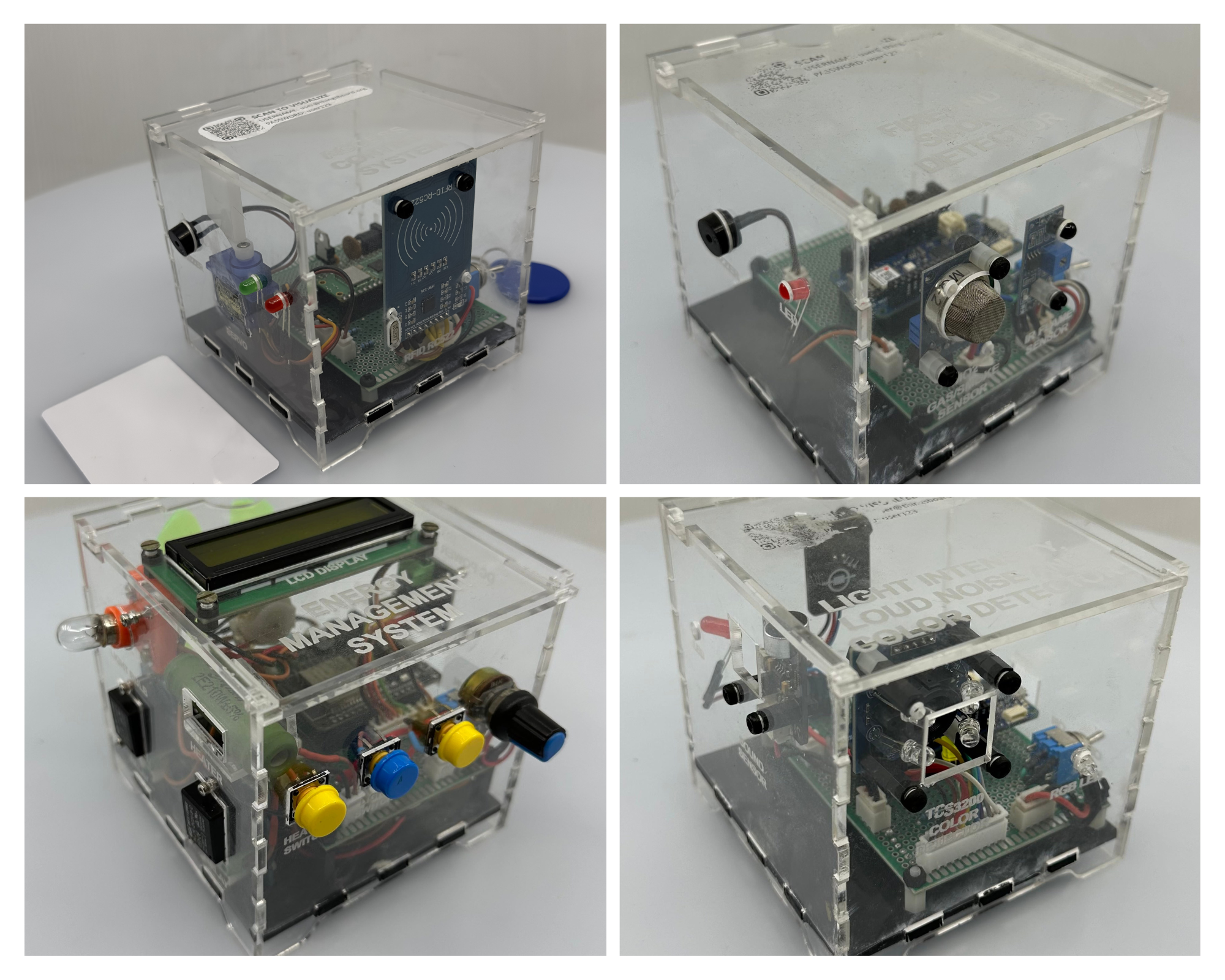
Smart City Project
IoT-driven smart city model for autonomous resource management, localization, path planning, and infrastructure automation.
- Implemented MQTT communication between a central server and autonomous bots.
- Built an OpenCV ArUco marker pipeline for real-time localization in a city-grid environment.
- Implemented Dijkstra-based path planning for dynamic shortest-path navigation.
- Integrated I2C, serial communication, and MySQL-backed sensor data handling.
PythonArduinoRaspberry PiMQTTOpenCV
2018 - 2019
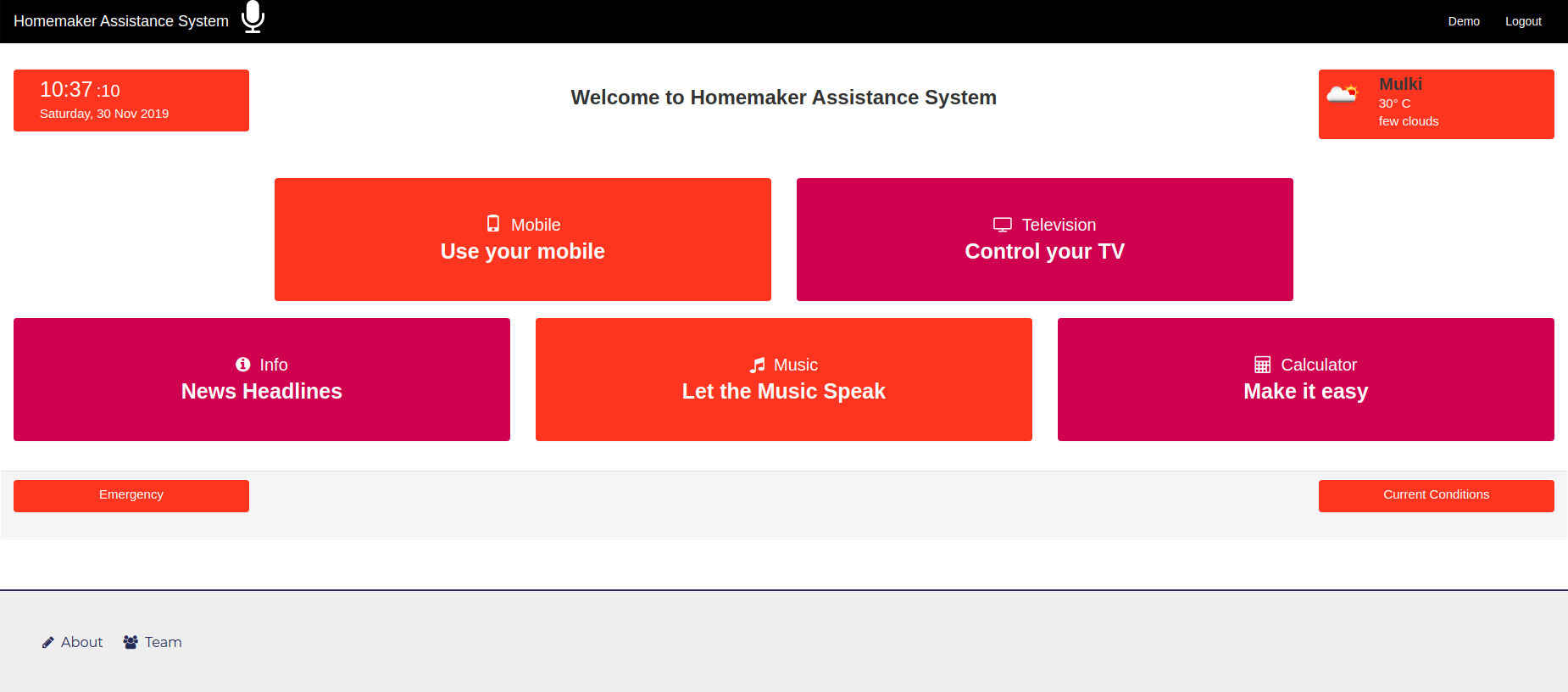
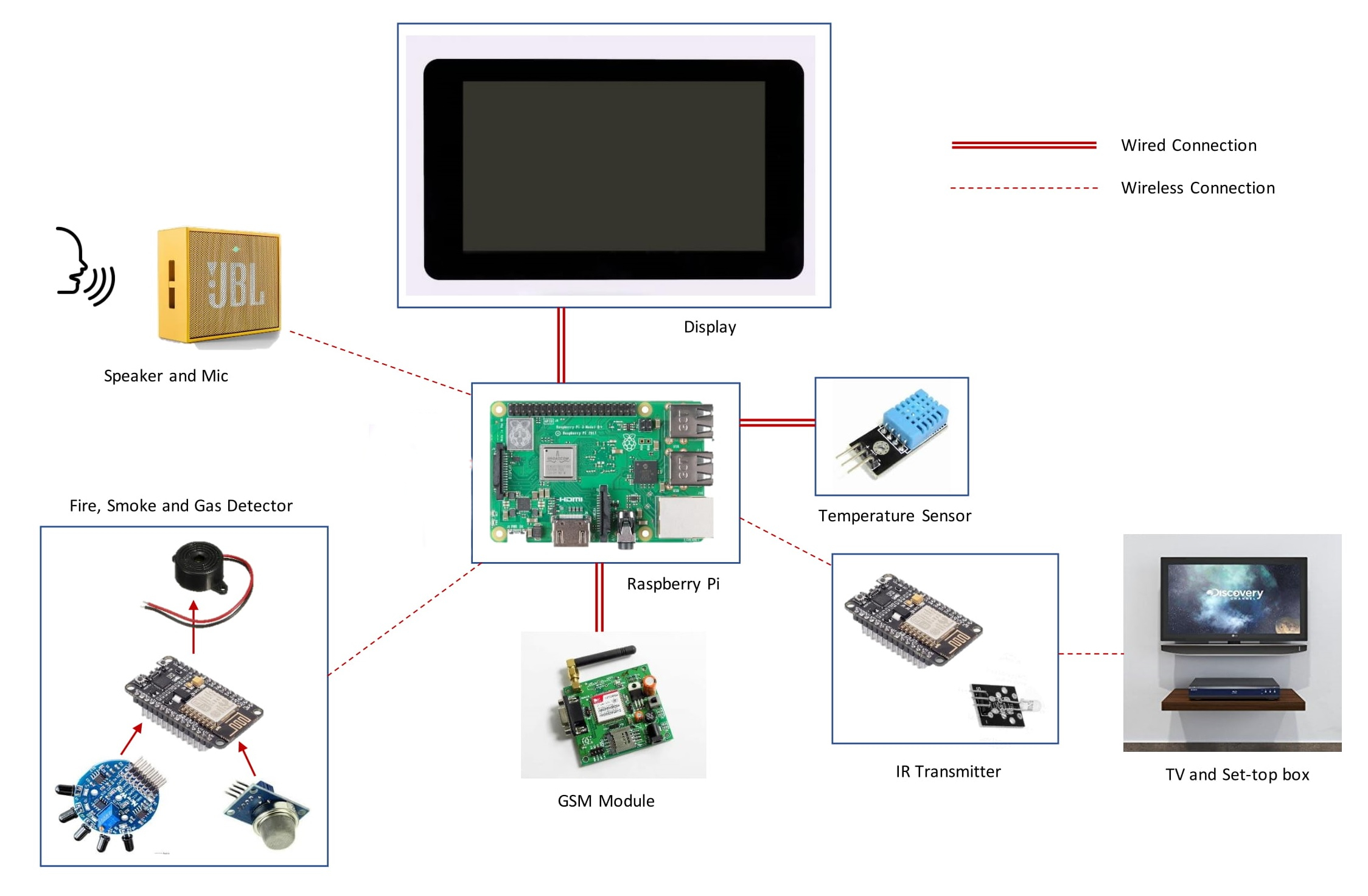
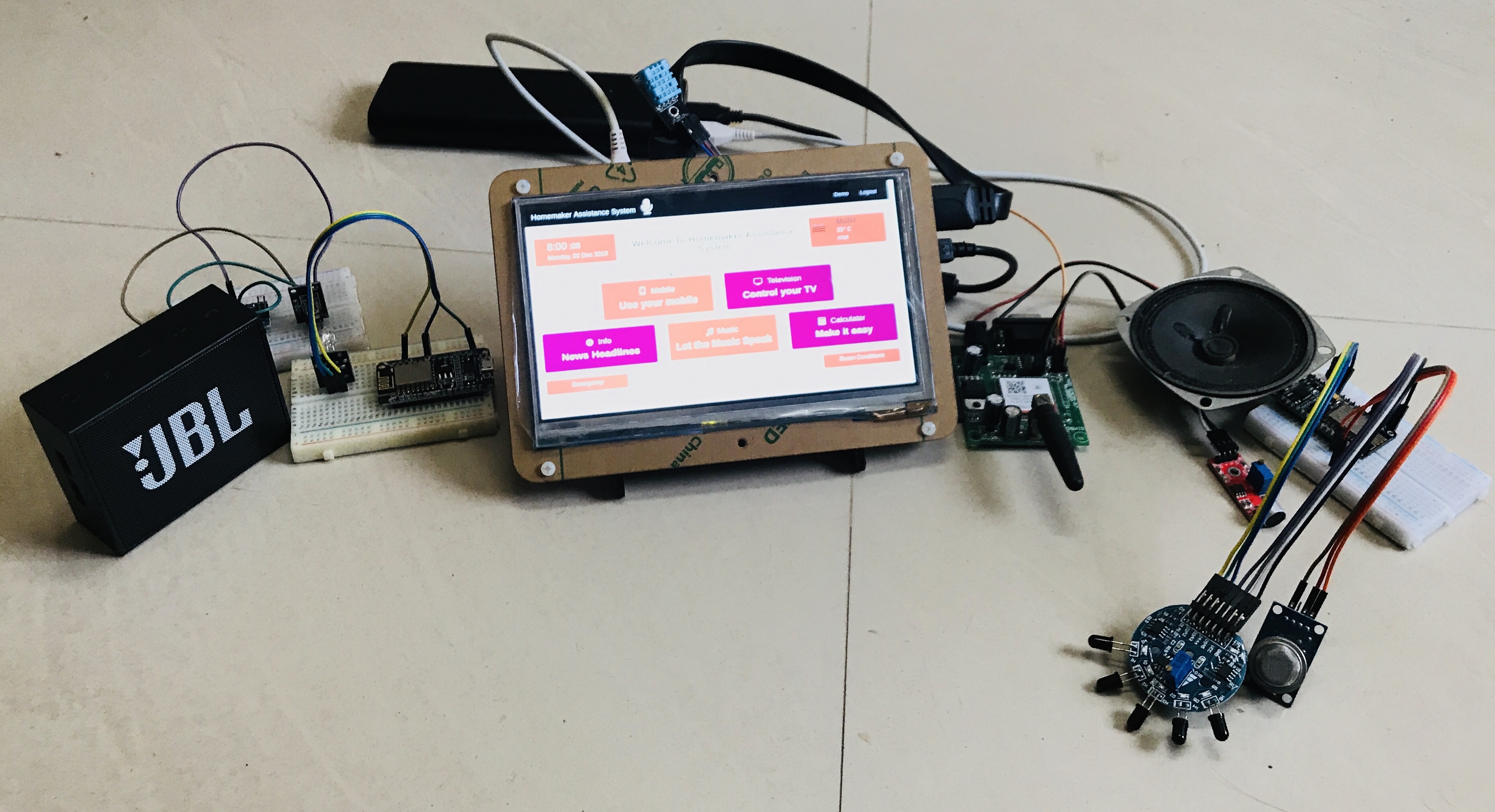
Home Assistance System
Voice-controlled smart home system designed to improve accessibility for disabled and visually impaired users through remote control, monitoring, and automated alerts.
- Developed a Django web interface for centralized home automation control.
- Integrated a GSM module and ESP8266 connectivity for remote device control.
- Implemented browser-based voice command support for hands-free operation.
- Added fire, gas, smoke, temperature, and humidity monitoring for real-time safety alerts.
Raspberry PiGSMPythonDjangoESP8266