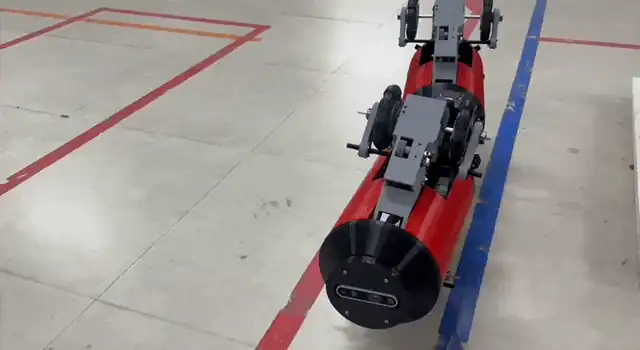
Multimodal Mobile Robot
Autonomous multimodal robot for inspection and surveillance in constrained environments, combining bio-inspired mechanisms, distributed embedded control, perception, and ROS2 teleoperation.
- Simulated robot mechanisms in SolidWorks Motion Analysis to estimate torque, force profiles, and component requirements.
- Designed a distributed embedded architecture where local microcontrollers handle mechanisms and a Jetson board coordinates system-level control.